Equus Acinonyx
Southern California Institute of Architecture (SCI-Arc)︎
ADVANCED ROBOTIC FABRICATION 2018:
PERFORMANCE ENHANCING ANIMAL PROSTHETIC
Equus-Acinonyx: Portmanteau of the genus names of the horse (Equus ferus caballus) and the cheetah (Acinonyx jubatus)
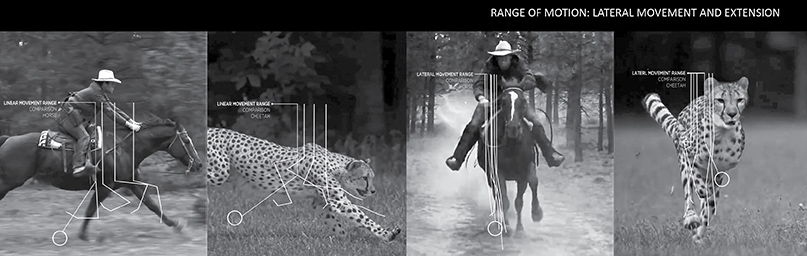
Equus-Acinonyx is a 1:1 prototype for a performance enhancing prosthetic limb developed to augment a horse’s range of motion. Modelled after the operational principles of a running cheetah, the limb specifically targets the horse’s ability to make abrupt turns during full gallop. Unlike the cheetah that has an ability to execute extreme changes in direction while moving at high speed, the horse’s range of motion is inversely proportional to its speed.
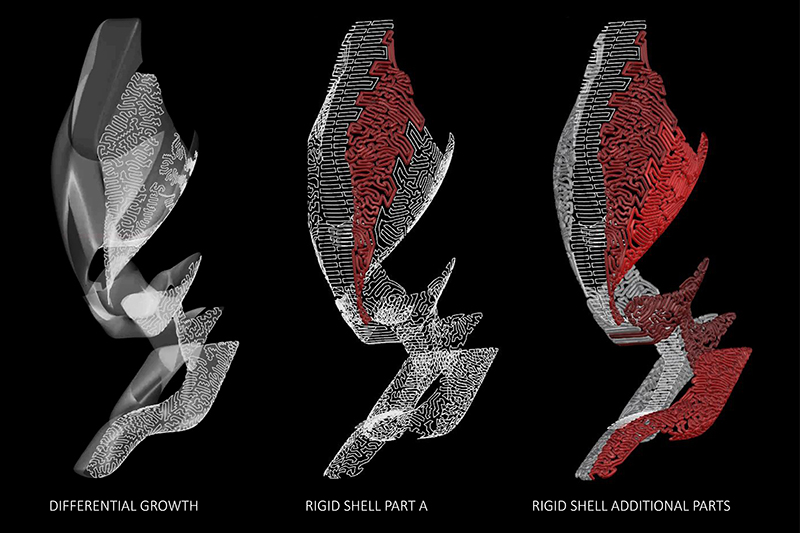
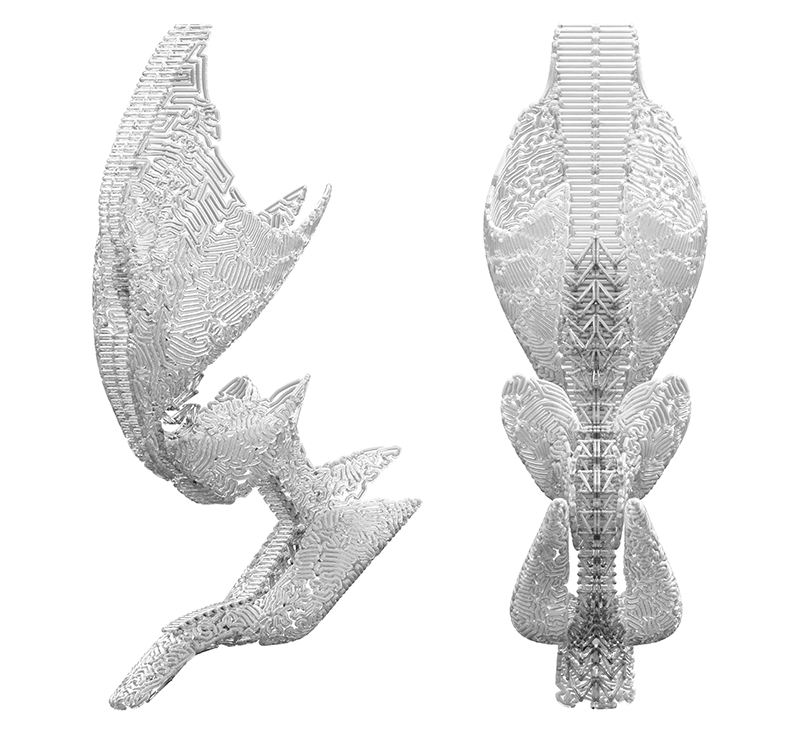
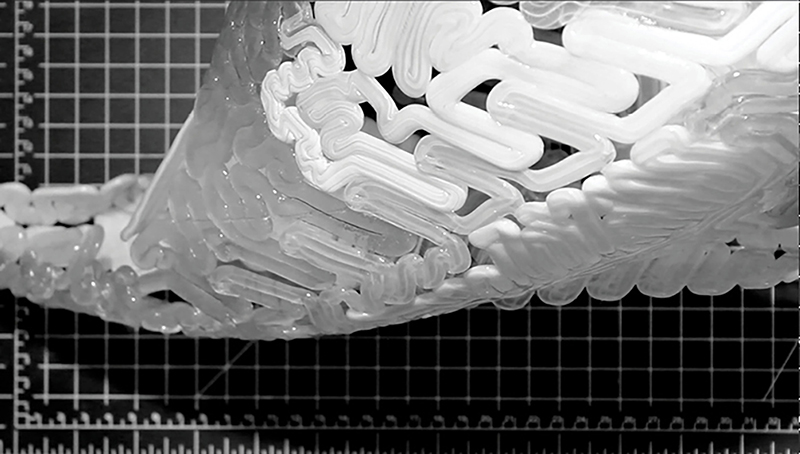
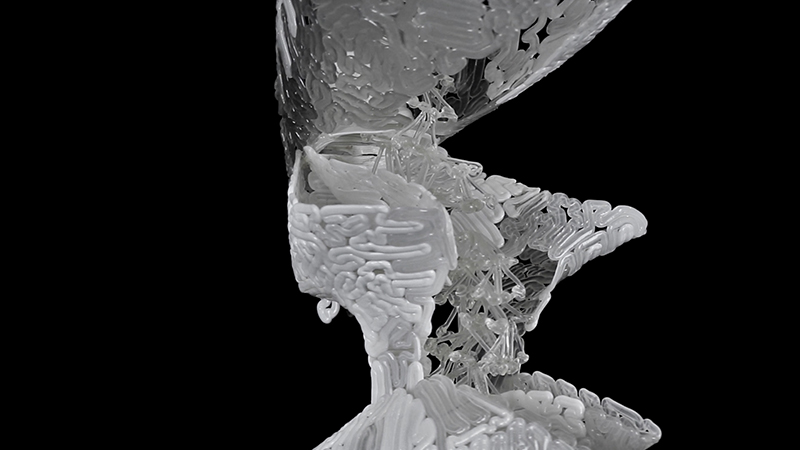
The limb is a single material composite that makes use of performative patterning. Through the application of varying material densities and directional distribution, the limb integrates multiple properties - such as springback, deflection, torsion and rigidity - that function symbiotically to perform as a whole.
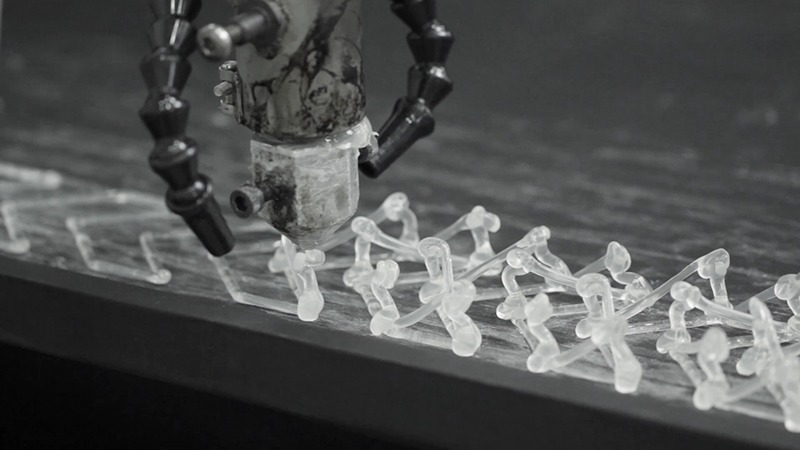
The project was developed through a series of studies incorporating PLA extrusions and a series of flexible silicone based materials with the use of robotic fabrication. The final prototype combines multiple modes of extrusion in order to produce a product that is performative, geometrically complex and has a high degree of resolution and texturing.
Course:
Advanced Robotic Fabrication 2018: Super Animal Prosthetic
The Southern California Institute of Architecture
Instructors:
Garrett Sutherlin Santo &
Herwig Baumgartner
Students:
Rachel Chen, Marcos Dana, Feryal Farahzad, Jinsoo Kim, Hseng Tai Lintner, Yo Tomura, Runze Zhang .
Equus-Acinonyx is a 1:1 prototype for a performance enhancing prosthetic limb developed to augment a horse’s range of motion. Modelled after the operational principles of a running cheetah, the limb specifically targets the horse’s ability to make abrupt turns during full gallop. Unlike the cheetah that has an ability to execute extreme changes in direction while moving at high speed, the horse’s range of motion is inversely proportional to its speed.
The limb is a single material composite that makes use of performative patterning. Through the application of varying material densities and directional distribution, the limb integrates multiple properties - such as springback, deflection, torsion and rigidity - that function symbiotically to perform as a whole.
The project was developed through a series of studies incorporating PLA extrusions and a series of flexible silicone based materials with the use of robotic fabrication. The final prototype combines multiple modes of extrusion in order to produce a product that is performative, geometrically complex and has a high degree of resolution and texturing.
Course:
Advanced Robotic Fabrication 2018: Super Animal Prosthetic
The Southern California Institute of Architecture
Instructors:
Garrett Sutherlin Santo &
Herwig Baumgartner
Students:
Rachel Chen, Marcos Dana, Feryal Farahzad, Jinsoo Kim, Hseng Tai Lintner, Yo Tomura, Runze Zhang .